SDGsへの貢献
製品やサービスを通じた社会貢献
自動運転時代の安全で快適な移動を支える
次世代の交通インフラ
自動運転の高度化により、信号機をはじめとするインフラと自動運転車両が連携する協調型自動運転へのニーズが高まっています。当社は、インフラから自動運転車両へ「信号情報」と「危険情報」を提供することで安全で快適な自動運転を支援するシステムを開発。ひとつの交差点からより広範囲な道路へ、さらに街中の駐車場へも展開しています。
未来への社会課題
- ・少子高齢化と都市部への人口集中による公共交通サービスを担う人材不足
- ・公共交通サービスの維持が困難
インフラから自動運転車両へ「信号情報」と「危険情報」を提供
自動運転時代の安全で快適な移動を支え、移動サービスの維持が困難な地域における社会課題の解決に貢献
交通インフラの進化を支える企業として、
社会課題の解決に貢献
当社では現在、インフラ協調型自動運転システムのさらなる機能強化に挑戦しています。インフラ側に設置された危険情報を検出するセンサの精度、信頼性およびロバスト性(外部要因によって影響されにくい性質のこと)の向上や、リアルタイムに情報を提供するための処理の高速化を進めています。またオートバレーパーキングシステムでは、「自動運転車の経路生成技術の開発」や「幅広い車種への対応」等の課題に取り組んでいます。
インフラ協調型自動運転システムは、「少子高齢化、都市部への人口集中により、公共交通を担う人材が不足し、移動サービスの維持が困難になる地域がでる」という社会課題の解決にも貢献します。実際のサービスとしては、近い将来、地方の公共交通のラストワンマイルを担う循環バスや乗車リクエストに応じて地域を周回するデマンドバス、あるいはバスをベースとする新しい交通手段として期待を集めるBRT ※1などとして立ちあがっていくと見られています。当社は、これまでの実証試験で積み重ねてきた実績、多くの鉄道事業者や各地の自治体の皆さまからパートナーとしてご相談をいただけるポジションをいかして、インフラ協調型自動運転システムの事業化を推進していきます。
※1 BRT: Bus Rapid Transitバス高速輸送システム

自動運転車に「信号情報」+「危険情報」を提供
2017年、当社は九州大学伊都キャンパスで自動運転バスの実証実験を行う「スマートモビリティ推進コンソーシアム」に参加し、地上インフラから自動運転車を支援するシステムの開発をスタートしました。当初は自動運転車に「信号情報」を提供する技術の開発に取り組み、その後、各地での実証実験を通して、「信号情報」+「危険情報」(飛び出し、対向直進車の有無など)を提供するシステムへと発展させてきました。
2020年10月、当社は福岡県北九州市および苅田町で実施された公道初となる自動走行を交差点から支援する「中型自動運転バス実証実験」に参加しました。「交差点に接近・通過する自動運転バスに信号の灯色や残り時間をリアルタイムに通知することで、急ブレーキを防止する仕組みの検証」、「車両、自転車、歩行者等との衝突リスクを算出し自動運転バスへリアルタイムに通知することで、見通しの悪い交差点での右左折時の事故を未然に防ぐ実験」などを行いました。さらに2021年2月には、埼玉県川口市の鳩ケ谷駅周辺でも自動運転バスの社会実装に向けた公道実証実験に参加し、「信号交差点で信号情報、危険情報の提供」に加えて「無信号交差点での危険情報提供による優先道路への右折合流支援」および「押ボタン信号接近時、自動運転バスの位置と速度から青信号を延長することで、押ボタン押下直後の黄信号変化による急ブレーキ回避の有効性」などの技術検証に取り組みました。
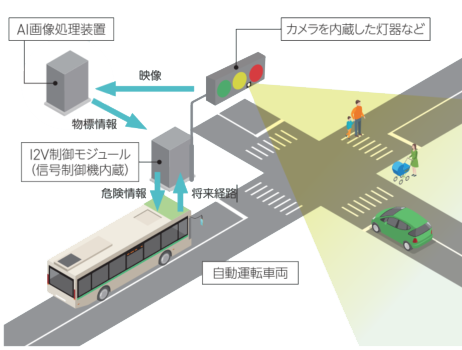
■ 日本信号のインフラ協調型システム
地上インフラ(信号機や道路脇)に設けられたセンサ類(カメラやLiDAR ※2 )から得られたデータをもとに、AI画像処理装置が自動運転車の進路にあるオブジェクトの種類(車、人など)とその物標情報(移動方向と速度)を検出します。そして、信号制御機に内蔵されたI2V ※3 制御モジュールが自動運転車の将来経路情報とAI画像処理装置からの情報を使って衝突リスクを算出し、自動運転車に危険情報として提供し、減
速や停止を促します。
※2 LiDAR Light Detection And Ranging:近赤外光や可視光、紫外線を対象物に照射し、その反射光を光センサでとらえ距離を測定する方式
※3 I2V(Infrastructure to Vehicle):インフラから車両への路車間通信